Uwaga! pełen kod tego wpisu dostępny jest tutaj
Po zapaleniu diody LED zawsze przychodzi apetyt na więcej. W moim zestawie peryferiów do maliny kolejnym elementem był wyświetlacz LCD 2x16 znaków zgodnym z HD44780.
Pora na wyświetlenie rytualnego Witaj świecie na ekranie.
Przygotowanie i podłączenie Link to heading
Oprócz zakupów z poprzedniego posta potrzebujemy:
- wyświetlacza (koszt około 10zł)
- dużo przewodów męsko-męskich
- Listwa pinowa (16 pinów) + zestaw do lutowania
- opcjonalnie potencjometr do sterowania kontrastem wyświetlacza.
W pierwszej kolejności lutujemy listwę pinową do naszego ekranu. Jako, że lutowałem po raz pierwszy i nie jestem dumny z wyników zamiast pozywać zdjęcia odsyłąm do filmiku.
W kolejnym etapie podłączamy ekran do naszej maliny zgodnie z tabelą:
| PI | LCD |
|---|---|
| GND | VSS |
| 5V | VDD |
| GND (potencj) | V0 |
| GPIO 22 | RS |
| GND | RW |
| GPIO 5 | E |
| D0 - D3 | |
| GPIO 26 | D4 |
| GPIO 19 | D5 |
| GPIO 13 | D6 |
| GPIO 6 | D7 |
| 5V | A |
| GND | K |
I schematem:

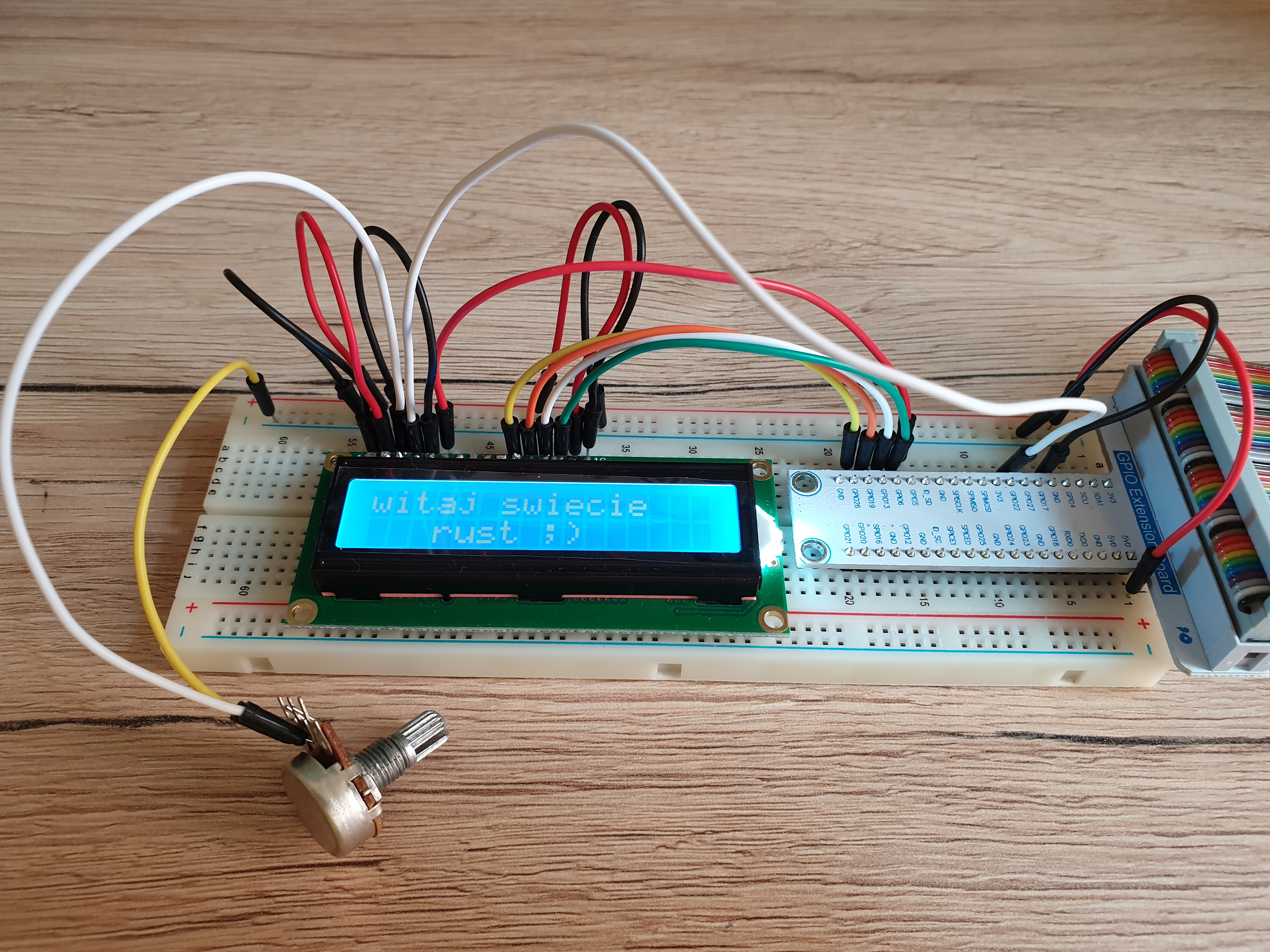
Mój pełen układ wygląda następująco:
zgodnie z zasadą szybkiego testowania czy wszystko poprawnie podłączyliśmy możemy na malinie wykonać następujący skrypt:
pip install Adafruit_CharLCD
cat <<EOF > lcd.py
from time import sleep
from Adafruit_CharLCD import Adafruit_CharLCD
lcd = Adafruit_CharLCD(rs=22, en=5, d4=26,d5=19,d6=13,d7=6,cols=16,lines=2)
lcd.clear()
lcd.message('Hello\n world!')
sleep(3)
lcd.clear()
EOF
python lcd.py
Dobra, dobra ale co właściwie się stało? Link to heading
Zgodnie z dokumentacją kontrolera pierwszym krokiem który trzeba wykonać jest inicjalizacja, czyli ustawienie sposobu działania i wybranie trybu działania kontrolera. Dostępne stany to:
- 8 bitowy
- 4 bitowy - oczekiwanie na pierwsze 4 bity
- 4 bitowy - oczekiwanie na drugie 4 bity
W pierwszym trybie wykorzystujemy 8 pinów GPIO do przesyłu danych i każdy z pinów podłączony jest do jednego wyjścia wyświetlacza, w drugim trybie wykorzystujemy jedynie 4 i w pierwszej kolejności wysyłamy 4 bardziej znaczące bity, pulsujemy stanem wyjścia Enable (tu przechodzimy do stanu 3) i wysyłąmy kolejne, mniej znaczące 4 bity i pulsujemy stanem wyjścia Enable. Pulsowanie oznacza zmianę Ze stanu wysokiego do niskiego.
W jaki sposób można zamodelować drobną bibliotekę, która będzie wykonywała to zadanie? W pierwszej kolejności należy utworzyć nowy projekt:
# tworzymy nowy projekt w katalogu lcd
cargo new lcd --bin
cd lcd
rustup target add armv7-unknown-linux-gnueabihf
# install arm linker
sudo apt-get install -qq gcc-arm-linux-gnueabihf
mkdir .cargo
cat <<EOF > .cargo/config
[target.armv7-unknown-linux-gnueabihf]
linker = "arm-linux-gnueabihf-gcc"
EOF
Oraz modyfikujemy cargo.toml poprzez dodanie dwóch zależności:
rppal = "0.11.3"
anyhow = "1.0"
Aby utrzymać minimalny porządek w kodzie możemy utworzyć dodatkowy plik src/lib.rs, w którym umieszczamy kod naszej biblioteki do komunikacji z ekranem:
use anyhow::Result;
use rppal::gpio::Gpio;
use rppal::gpio::OutputPin;
use std::{thread, time};
pub struct Lcd {
/// cztery piny do przesyłu danych (bit 4-7)
pub data: [OutputPin; 4],
/// pin wyboru rejestru
pub rs: OutputPin,
/// pin enable
pub en: OutputPin,
}
const ROW_OFFSET: [u8; 2] = [0x00, 0x40];
// commands:
const LCD_SETDDRAMADDR: u8 = 0x80;
impl Lcd {
pub fn new() -> Result<Lcd> {
let rs = Gpio::new()?.get(22)?.into_output();
let enable = Gpio::new()?.get(5)?.into_output();
let d4 = Gpio::new()?.get(26)?.into_output();
let d5 = Gpio::new()?.get(19)?.into_output();
let d6 = Gpio::new()?.get(13)?.into_output();
let d7 = Gpio::new()?.get(6)?.into_output();
Ok(Lcd {
data: [d4, d5, d6, d7],
rs: rs,
en: enable,
})
}
pub fn init(&mut self) -> Result<()> {
// initialize
self.write(0x33, false)?;
self.write(0x32, false)?;
self.write(0x08 | 0x04 , false)?; // LCD_DISPLAYON LCD_DISPLAYCONTROL
self.write(0x20 | 0x00 | 0x08, false)?; // LCD_4BITMODE 2 lines function set
self.write(0x04 | 0x02, false)?; // LCD_ENTRYLEFT
self.clear()?;
Ok(())
}
pub fn clear(&mut self)-> Result<()> {
self.write(0x01, false)?; // command to clear display LCD_CLEARDISPLAY
thread::sleep(time::Duration::new(0, 1570000)); // 1,57 ms sleep, clearing the display takes a long time
Ok(())
}
pub fn message(&mut self, text: String) -> Result<()> {
self.clear()?;
let mut line = 0;
for char in text.chars() {
if char == '\n' {
line += 1;
self.set_cursor(0, line)?
} else {
// todo perform some check of casting
self.write(char as u8, true)?
}
}
Ok(())
}
pub fn set_cursor(&mut self, col: u8, row: u8) -> Result<()> {
let mut actual_row = row;
// Clamp row to the last row of the display.
if row > 2 { // max row
actual_row = 1
}
self.write(LCD_SETDDRAMADDR | (col + ROW_OFFSET[actual_row as usize]), false)?;
Ok(())
}
fn pulse_enable(&mut self) {
let write_pin = |pin: &mut OutputPin, enabled: bool| {
if enabled {
pin.set_high()
} else {
pin.set_low()
}
};
// Breathing time
thread::sleep(time::Duration::new(0, 450));
// enable pulse must be > 450ns
write_pin(&mut self.en, false);
thread::sleep(time::Duration::new(0, 1000));
// enable pulse must be > 450ns
write_pin(&mut self.en, true);
thread::sleep(time::Duration::new(0, 450));
// commands need 37us to settle
write_pin(&mut self.en, false);
thread::sleep(time::Duration::new(0, 37 * 1000));
}
pub fn write(&mut self, value: u8, char_mode: bool) -> Result<()> {
let write_pin = |pin: &mut OutputPin, enabled: bool| {
if enabled {
pin.set_high()
} else {
pin.set_low()
}
};
write_pin(&mut self.en, false);
write_pin(&mut self.rs, char_mode);
write_pin(&mut self.data[0], value & 0b0001_0000u8 > 0);
write_pin(&mut self.data[1], value & 0b0010_0000u8 > 0);
write_pin(&mut self.data[2], value & 0b0100_0000u8 > 0);
write_pin(&mut self.data[3], value & 0b1000_0000u8 > 0);
self.pulse_enable();
write_pin(&mut self.data[0], value & 0b0000_0001u8 > 0);
write_pin(&mut self.data[1], value & 0b0000_0010u8 > 0);
write_pin(&mut self.data[2], value & 0b0000_0100u8 > 0);
write_pin(&mut self.data[3], value & 0b0000_1000u8 > 0);
self.pulse_enable();
Ok(())
}
}
Pierwszym krokiem jest utworzenie struct Lcd:
pub struct Lcd {
/// cztery piny do przesyłu danych (bit 4-7)
pub data: [OutputPin; 4],
/// pin wyboru rejestru
pub rs: OutputPin,
/// pin enable
pub en: OutputPin,
}
Zawiera referencje do wszystkich pinów, które są nam potrzebne do wykonywania operacji w trybie 4-bitowym. Aby dodać metody należy zdeklarować je w bloku impl jak w przypadku metody konstruującej new:
impl Lcd {
pub fn new() -> Result<Lcd> {
let rs = Gpio::new()?.get(22)?.into_output();
let enable = Gpio::new()?.get(5)?.into_output();
let d4 = Gpio::new()?.get(26)?.into_output();
let d5 = Gpio::new()?.get(19)?.into_output();
let d6 = Gpio::new()?.get(13)?.into_output();
let d7 = Gpio::new()?.get(6)?.into_output();
Ok(Lcd {
data: [d4, d5, d6, d7],
rs: rs,
en: enable,
})
}
/// rest skipped for now
Wykorzystujemy bibliotekę rppal i konstruujemy zestaw pinów wyjściowych:
let rs = Gpio::new()?.get(22)?.into_output();
W kodzie pojawia się znak ?, jest to operator, który pomaga przy obsłudze błędów.
Użycie ? oznacza, że nasz kod ma w tym miejscu zwrócić sterowanie wyżej, przekazując błąd jeżeli zaistniał lub odpakować poprawny wynik. Kompilator nie pozwoli nam popełnić błędu i zmusza nas do obsłużenia wszystkich możliwości.
Mamy już gotową instancję Lcd zawierającą wszystkie piny potrzebne do komunikacji. Teraz należy zainicjować nasz wyświetlacz:
pub fn init(&mut self) -> Result<()> {
// checkout Mode selection in https://en.wikipedia.org/wiki/Hitachi_HD44780_LCD_controller
// this will set controller to 4-bit mode no matter the entering state
self.write(0x33, false)?;
self.write(0x32, false)?;
thread::sleep(time::Duration::new(0, 4 * 1000)); // wait?
// Turn display on and display control
self.write(0x08 | 0x04, false)?;
thread::sleep(time::Duration::new(0, 4 * 1000)); // wait?
// Set Entry left mode
self.write(0x06, false)?;
thread::sleep(time::Duration::new(0, 4 * 1000)); // wait?
self.clear()?;
Ok(())
}
W powyższym fragmencie metoda init przyjmuje jeden parametr &mut self. Oznacza to, ze przyjmuje mutowalną referencję do samego siebie. Mutowalna referencja oznacza, że mamy możliwość modyfikowania wartości bez przejmowania własności.
Pierwsze dwie wartości 0x33 i 0x32 zagwarantują, że dalsza część programu będzie działała w trybie 4 bitowym bez znaczenia jaki stan początkowy zastał program. W dalszej części metody ustawiane są pozostałe wymagane parametry pracy kontrolera.
Wywołanie self.clear() czyści bufory kontrolera. W przypadku wcześniejszego stanu spowoduje, to że po wykonaniu metody init ekran będzie czysty.
Kluczowym fragmentem naszego programu jest metoda write:
pub fn write(&mut self, value: u8, char_mode: bool) -> Result<()> {
let write_pin = |pin: &mut OutputPin, enabled: bool| {
if enabled {
pin.set_high()
} else {
pin.set_low()
}
};
write_pin(&mut self.en, false);
write_pin(&mut self.rs, char_mode);
write_pin(&mut self.data[0], value & 0b0001_0000u8 > 0);
write_pin(&mut self.data[1], value & 0b0010_0000u8 > 0);
write_pin(&mut self.data[2], value & 0b0100_0000u8 > 0);
write_pin(&mut self.data[3], value & 0b1000_0000u8 > 0);
self.pulse_enable();
write_pin(&mut self.data[0], value & 0b0000_0001u8 > 0);
write_pin(&mut self.data[1], value & 0b0000_0010u8 > 0);
write_pin(&mut self.data[2], value & 0b0000_0100u8 > 0);
write_pin(&mut self.data[3], value & 0b0000_1000u8 > 0);
self.pulse_enable();
Ok(())
}
W trybie 4 bitowym używane są piny kontrolne i 4 równoległe linie danych.
Wybór rejestru (register select RS) pozwala sterować do którego rejestru mają być zapisywane sygnały. Kontroler posiada dwa rejestry - danych (stan wysoki) i poleceń - (stan niski)
Zapis/odczyt (read/write RW) dla zapisu powinien być ustawiony na stan niski. Dlatego w naszym układzie podłączony jest do pinu GND
Włącz (Enable EN) steruje wzbudzeniem działania kontrolera. Zmiana ze stanu wysoki na niski jest wymagana aby wywołać zadeklarowane działanie
Piny danych (D4-D7) pozwalające na przesyłanie znaków do wyświetlenia lub komend
W takim razie w jaki sposób zostało zaimplementowane “pulsowanie”?
fn pulse_enable(&mut self) {
let write_pin = |pin: &mut OutputPin, enabled: bool| {
if enabled {
pin.set_high()
} else {
pin.set_low()
}
};
// Breathing time
thread::sleep(time::Duration::new(0, 450));
// enable pulse must be > 450ns
write_pin(&mut self.en, false);
thread::sleep(time::Duration::new(0, 1000));
// enable pulse must be > 450ns
write_pin(&mut self.en, true);
thread::sleep(time::Duration::new(0, 450));
// commands need 37us to settle
write_pin(&mut self.en, false);
thread::sleep(time::Duration::new(0, 37 * 1000));
}
Deklarujemy lokalnego closurka write_pin, który zmienia stan pojedynczego pina.
Następnie defensywnie zmieniamy stan pina EN z na niski -> wysoki -> niski, żeby mieć pewność, że bez warunku jaki był wcześniejszy stan doszło do “zapulsowania”.
Oczekiwanie wykonywane przez thread::sleep jest wymagane przez kontroler zgodnie z wymaganiami w dokumentacji.
Wygląda na to, że wszystkie komponenty oprócz pisania tekstu do samego kontrolera są już zaimplementowane, Zatem na czym polega pisanie tekstu?
pub fn message(&mut self, text: String) -> Result<()> {
self.clear()?;
let mut line = 0;
for char in text.chars() {
if char == '\n' {
line += 1;
self.set_cursor(0, line)?
} else {
// todo perform some check of casting
self.write(char as u8, true)?
}
}
Ok(())
}
pub fn set_cursor(&mut self, col: u8, row: u8) -> Result<()> {
let mut actual_row = row;
// Clamp row to the last row of the display.
if row > 2 { // max row
actual_row = 1
}
self.write(LCD_SETDDRAMADDR | (col + ROW_OFFSET[actual_row as usize]), false)?;
Ok(())
}
Ponownie defensywnie czyścimy na początku bufory controllera. a następnie iterujemy po wszystkich literach ciągu. Jeżeli natrafimy na znak nowej lini \n zmieniamy kursor na odpowiednią linię w przeciwnym przypadku zapisujemy odpowiednie znaki.
W powyższym kodzie znajduje się dużo możliwości poprawy:
- co jeżeli wejście ma w linijce więcej niż 16 znaków?
- co jeżeli lini jest więcej niż wyświetlacz posiada?
- co jeżeli znak jest spoza zakresu 0-255 (typ na który castujemy to u8 czyli 8 bitów)?
W przypadku 1 zachowanie ekranu jest niezdefiniowane. W 2 przypadku instrukcja warunkowa spowoduje, że 3 i kolejne linie będą nadpisywały drugą linię. W 3 przypadku problem może być większy bo zgodnie z zasadami języka dojedzie do błędnego wyniku:
#[test]
fn cast() {
let hmm = 256;
assert_eq!(hmm, 0)
}
Aby ograniczyć te problemy możemy dodać walidację wejścia przekazywanego przez użytkownika. Zmieniony kod wygląda następująco:
fn process_msg(text: &str) -> Result<Vec<u8>> {
if text.lines().count() > 2 {
return Err(anyhow!(
"Invalid line count. We have only 2 lines on screen"
));
}
for (i, line) in text.lines().map(|l| l.replace("\n", "")).enumerate() {
if line.chars().count() > 16 {
return Err(anyhow!(
format!("Line number {} has more then 16 allowed characters", i)
));
}
}
let mut result = vec![];
for char in text.chars() {
result.push(u8::try_from(char as u32)?);
}
Ok(result)
}
pub fn message(&mut self, text: String) -> Result<()> {
self.clear()?;
let mut line = 0;
// let characters = text.chars();
let characters = Lcd::process_msg(&text)?;
for char in characters {
if char == '\n' as u8 {
line += 1;
self.set_cursor(0, line)?
} else {
// todo perform some check of casting
self.write(char as u8, true)?
}
}
Ok(())
}
W nowej prywatnej funkcji process_msg przetwarzamy otrzymany ciąg znaków i zwracamy wektor znaków gotowych do zapisu o typie Vec<u8>. Jak to osiągneliśmy? W pierwszej kolejności sprawdzamy czy liczba lini jest taka jak się spodziewamy:
if text.lines().count() > 2 {
return Err(anyhow!(
"Invalid line count. We have only 2 lines on screen"
));
}
Jeżeli jest większa niż spodziewane 2 to zwracamy błąd używając wariantu enuma Result sugerującego błąd: Err.
Używamy też rewelacyjnej biblioteki anyhow aby nie tworzyć zbędnych typów błędów. W większej bibliotece możliwe, że miałoby to większe znaczenie i można by użyć alternatywnej thiserror.
W kolejnym kroku iterujemy po każdej linijce i sprawdzamy, czy każda linijka posiada maksymalnie 16 znaków:
for (i, line) in text.lines().map(|l| l.replace("\n", "")).enumerate() {
if line.chars().count() > 16 {
return Err(anyhow!(
format!("Line number {} has more then 16 allowed characters", i)
));
}
}
Ostatecznie przepisujemy znaki do wektora gotowego do zapisu na naszym ekranie walidując przy okazji czy wskazane znaki znajdują się w odpowiednim zakresie 0-255.
let mut result = vec![];
for char in text.chars() {
result.push(u8::try_from(char as u32)?);
}
Ok(result)
Aby mieć pewność, że nasze zmiany faktycznie działają możemy napisać kilka testów:
#[cfg(test)]
mod tests {
use super::*;
#[test]
fn check_our_validation(){
assert!( Lcd::process_msg("hello \n world").is_ok());
assert!( Lcd::process_msg("hello \n world\n").is_ok());
assert!( Lcd::process_msg("hello \n world\n third line\n").is_err() );
assert!( Lcd::process_msg("hello this is a long sentence\n world").is_err() );
assert!( Lcd::process_msg("ą").is_err());
}
}
Po uruchomieniu testu używając polecenia cargo test --lib widzimy, że wszystko jest ok:
$ cargo test --lib
Finished test [unoptimized + debuginfo] target(s) in 0.00s
Running target/debug/deps/lcd-b10bed0c8c7b28a9
running 1 test
test tests::check_our_validation ... ok
test result: ok. 1 passed; 0 failed; 0 ignored; 0 measured; 0 filtered out
Pozostaje szybki test wykonania na malinie. W pliku src/main.rs zapisujemy:
use anyhow::Result;
use lcd::Lcd;
use std::{thread, time};
fn main() -> Result<()> {
let mut pins = Lcd::new()?;
pins.init()?;
pins.message(String::from("witaj swiecie \n rust :)"))?;
thread::sleep(time::Duration::new(2, 0));
pins.message(String::from("witaj swiecie \n rust ;)"))?;
thread::sleep(time::Duration::new(2, 0));
pins.clear()?;
Ok(())
}
Całość możemy skompilować używając polecenia cargo build --target armv7-unknown-linux-gnueabihf i przesłać na malinę używając scp.
Podsumowanie Link to heading
Jesteśmy w stanie bez problemu sterować tekstem na naszym wyświetlaczu.
Dodatkowo mamy bibliotekę, która wykonuje podstawową walidację wejścia.
Podobnie jak w scali istnieją typy (w scali zamiast Result jest to Try) które sygnalizują, że dany fragment kodu może się nie udać i wymusza to na nas dbałość o zaopiekowanie każdej możliwości (w scali dopiero przy pattern matchingu).
Aby rozwinąć dalej projekt należało by umożliwić parametryzowanie działania (które piny podłączamy czy w jakim trybie działamy) przykładowo przy użyciu crate config.